Un DSL ( Domain Specific Language ) est un langage de programmation créé pour une tâche spécifique à l'inverse des langages de programmation usuels comme Python. On peut s'en servir par exemple pour créer des petits langages maison utilisés au sein d'une application.
Dans ce billet, je vais vous montrer en Python, comment créer un langage pour contrôler le mouvement d'un robot fictif grâce à la librarie textX.
Définition de notre grammaire
Notre langage doit pouvoir permettre de contrôler le déplacement d'un robot sur un échiquier dans les 4 directions ( up, down, left, right).
Par exemple :
move up # Bouge d'une case vers le haut
move up 3 # Bouge de 3 case vers le haut
move left 3 # Bouge de 3 cause vers la gauche
L'idée est de parser ces instructions afin de récupérer les variables pour les consommer dans notre application.
Nous pourrions très bien résoudre ce problème en parsant les instructions à coup d'expression régulière. Mais dès que le langage deviendra plus complexe, l'utilisation d'un outil comme textX vous facilitera grandement la tâche.
TextX: Un métalangage pour définir notre langage
La librairie textX en Python dispose d'un métalangage permettant de décrire la grammaire du langage que nous voulons créer (d'ou le prefix méta). Ce métamodèle est alors utilisé par textX pour construire l'arbre syntaxique nécessaire pour parser les instructions données à notre robot. Je vous conseille de lire le code et de tester pour comprendre.
Installation
J'utilise Python 3.7, et la version 2.3 de textX :
pip install textX
Le métamodèle décrivant la grammaire
Commençons par créer un fichier robo.tx afin de décrire notre grammaire en utilisant différents symboles.
- Direction est un symbole décrivant les 4 directions possibles. C'est un symbole terminal, car il ne peut pas être décomposé en sous-symbole contrairement à MoveCommand.
- MoveCommand est un symbole non terminal décrit à l'aide du symbole Direction et du symbole NUMBER. Ce dernier est un symbole fourni par défaut par textX pour décrire un nombre. La liste des autres types est disponible ici..
// robo.tx
MoveCommand:
'move' Direction NUMBER
;
Direction:
'up'|'down'|'left'|'right'
;
Utiliser cette commande pour vérifier que le modèle est valide:
textx check robot.tx
Nous pouvons maintenant affecter les différentes valeurs de l'instruction à des variables qui seront accessibles depuis Python. Par la même occasion, je rends l'option step optionnelle grâce à l'opérateur "?". Pour cela, je modifie le code de la façon suivante:
MoveCommand:
action='move' direction=Direction (step=NUMBER)?
;
Direction:
'up'|'down'|'left'|'right'
;
Maintenant, pour utiliser cette grammaire en Python, et parser par exemple l'instruction "move up 4", il faut charger le métamodèle et parser l'instruction à l'aide de la méthode model_from_str. Nous obtenons alors l'instance d'une classe MoveCommand contenant les 3 variables: action, direction et step.
from textx import metamodel_from_file
metamodel = metamodel_from_file("robot.tx")
cmd = metamodel.model_from_str("move up 4")
print(type(cmd)) # MoveCommand instance class
print(cmd.action) # "move"
print(cmd.direction) # "up"
print(cmd.step) # 4
Allez un peu plus loin
La classe MoveCommand peut être personnalisée en amont, pour pouvoir jouer finement sur les variables du modèle. Nous allons modifier la classe afin que le paramètre step soit égal à 1 par défaut lorsque celui-ci n'est pas renseigné.
from textx import metamodel_from_file
class MoveCommand:
def __init__(self, *args, **kwargs):
self.action = kwargs.get("action")
self.direction = kwargs.get("direction")
self.step = kwargs.get("step")
if self.step is None or self.step == 0:
self.step = 1.0
metamodel = metamodel_from_file("robot.tx", classes=[MoveCommand])
model = metamodel.model_from_str("move up")
print(model.step) # step = 1
Nous pouvons ajouter également à notre grammaire la possibilité de donner une suite d'instruction séparée par un point virgule. C'est là toute la magie de textX. Car il suffit d'ajouter le nouveau symbole Command que textX interprétera comme une liste de MoveCommand séparés par des points-virgules.
Command:
commands += MoveCommand[";"]
;
MoveCommand:
action='move' direction=Direction (step=NUMBER)?
;
Direction:
'up'|'down'|'left'|'right'
;
metamodel = metamodel_from_file("robot.tx", classes=[MoveCommand])
model = metamodel.model_from_str("move up; move left 3; move right")
for cmd in model.commands:
print(cmd.step)
Visualiser votre modèle
Pour finir, vous pouvez visualiser votre modèle à l'aide de la commande suivante et du fichier robot.txt contenant la suite d'instruction à tester :
# Fichier robot.txt
move up; move left 3; move right
textx visualize robot.tx robot.txt
dot -Tpng -O robot.txt.dot
display robot.txt.dot.png
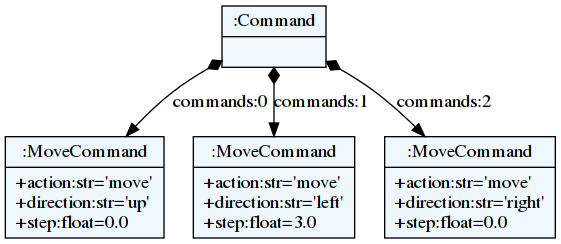
Arbre syntaxique des 3 commandes du fichier robot.txt
Conclusion
Dans ce billet, j'ai présenté un cas très simple à visée pédagogique. Mais vous pouvez aller plus loin en créant des parseurs aussi complexes que des parseurs SQL ou JSON. Après, attention, n'utilisez pas ce genre d'outil pour réinventer la roue. Il existe déjà des langages (comme Python) qui font très bien les choses. Personnellement, j'ai créée un DSL dans mon logiciel cutevariant pour pouvoir facilement créer des filtres en ligne de commande sans avoir à passer par les contrôleurs d'une interface graphique. Vous pouvez jeter un oeil sur ma grammaire ici.
Je vous invite à aussi regarder les exemples sur le site officiel dont je me suis largement inspiré.
Référence
Merci à @Aluriak pour m'avoir présenté cette techno !
Ce site est versionné sur GitHub. Vous pouvez corriger des erreurs en vous rendant à cette adresse
Go Top
comments powered by Disqus